


Note
Click here to download the full example code
Reinforcement Learning (PPO) with TorchRL Tutorial
Created On: Mar 15, 2023 | Last Updated: Mar 20, 2025 | Last Verified: Nov 05, 2024
Author: Vincent Moens
This tutorial demonstrates how to use PyTorch and torchrl to train a parametric policy
network to solve the Inverted Pendulum task from the OpenAI-Gym/Farama-Gymnasium
control library.
Key learnings:
How to create an environment in TorchRL, transform its outputs, and collect data from this environment;
How to make your classes talk to each other using
TensorDict;The basics of building your training loop with TorchRL:
How to compute the advantage signal for policy gradient methods;
How to create a stochastic policy using a probabilistic neural network;
How to create a dynamic replay buffer and sample from it without repetition.
We will cover six crucial components of TorchRL:
If you are running this in Google Colab, make sure you install the following dependencies:
!pip3 install torchrl
!pip3 install gym[mujoco]
!pip3 install tqdm
Proximal Policy Optimization (PPO) is a policy-gradient algorithm where a batch of data is being collected and directly consumed to train the policy to maximise the expected return given some proximality constraints. You can think of it as a sophisticated version of REINFORCE, the foundational policy-optimization algorithm. For more information, see the Proximal Policy Optimization Algorithms paper.
PPO is usually regarded as a fast and efficient method for online, on-policy reinforcement algorithm. TorchRL provides a loss-module that does all the work for you, so that you can rely on this implementation and focus on solving your problem rather than re-inventing the wheel every time you want to train a policy.
For completeness, here is a brief overview of what the loss computes, even though
this is taken care of by our ClipPPOLoss module—the algorithm works as follows:
1. we will sample a batch of data by playing the
policy in the environment for a given number of steps.
2. Then, we will perform a given number of optimization steps with random sub-samples of this batch using
a clipped version of the REINFORCE loss.
3. The clipping will put a pessimistic bound on our loss: lower return estimates will
be favored compared to higher ones.
The precise formula of the loss is:
There are two components in that loss: in the first part of the minimum operator, we simply compute an importance-weighted version of the REINFORCE loss (for example, a REINFORCE loss that we have corrected for the fact that the current policy configuration lags the one that was used for the data collection). The second part of that minimum operator is a similar loss where we have clipped the ratios when they exceeded or were below a given pair of thresholds.
This loss ensures that whether the advantage is positive or negative, policy updates that would produce significant shifts from the previous configuration are being discouraged.
This tutorial is structured as follows:
First, we will define a set of hyperparameters we will be using for training.
Next, we will focus on creating our environment, or simulator, using TorchRL’s wrappers and transforms.
Next, we will design the policy network and the value model, which is indispensable to the loss function. These modules will be used to configure our loss module.
Next, we will create the replay buffer and data loader.
Finally, we will run our training loop and analyze the results.
Throughout this tutorial, we’ll be using the tensordict library.
TensorDict is the lingua franca of TorchRL: it helps us abstract
what a module reads and writes and care less about the specific data
description and more about the algorithm itself.
import warnings
warnings.filterwarnings("ignore")
from torch import multiprocessing
from collections import defaultdict
import matplotlib.pyplot as plt
import torch
from tensordict.nn import TensorDictModule
from tensordict.nn.distributions import NormalParamExtractor
from torch import nn
from torchrl.collectors import SyncDataCollector
from torchrl.data.replay_buffers import ReplayBuffer
from torchrl.data.replay_buffers.samplers import SamplerWithoutReplacement
from torchrl.data.replay_buffers.storages import LazyTensorStorage
from torchrl.envs import (Compose, DoubleToFloat, ObservationNorm, StepCounter,
TransformedEnv)
from torchrl.envs.libs.gym import GymEnv
from torchrl.envs.utils import check_env_specs, ExplorationType, set_exploration_type
from torchrl.modules import ProbabilisticActor, TanhNormal, ValueOperator
from torchrl.objectives import ClipPPOLoss
from torchrl.objectives.value import GAE
from tqdm import tqdm
Define Hyperparameters
We set the hyperparameters for our algorithm. Depending on the resources
available, one may choose to execute the policy on GPU or on another
device.
The frame_skip will control how for how many frames is a single
action being executed. The rest of the arguments that count frames
must be corrected for this value (since one environment step will
actually return frame_skip frames).
is_fork = multiprocessing.get_start_method() == "fork"
device = (
torch.device(0)
if torch.cuda.is_available() and not is_fork
else torch.device("cpu")
)
num_cells = 256 # number of cells in each layer i.e. output dim.
lr = 3e-4
max_grad_norm = 1.0
Data collection parameters
When collecting data, we will be able to choose how big each batch will be
by defining a frames_per_batch parameter. We will also define how many
frames (such as the number of interactions with the simulator) we will allow ourselves to
use. In general, the goal of an RL algorithm is to learn to solve the task
as fast as it can in terms of environment interactions: the lower the total_frames
the better.
frames_per_batch = 1000
# For a complete training, bring the number of frames up to 1M
total_frames = 50_000
PPO parameters
At each data collection (or batch collection) we will run the optimization
over a certain number of epochs, each time consuming the entire data we just
acquired in a nested training loop. Here, the sub_batch_size is different from the
frames_per_batch here above: recall that we are working with a “batch of data”
coming from our collector, which size is defined by frames_per_batch, and that
we will further split in smaller sub-batches during the inner training loop.
The size of these sub-batches is controlled by sub_batch_size.
sub_batch_size = 64 # cardinality of the sub-samples gathered from the current data in the inner loop
num_epochs = 10 # optimization steps per batch of data collected
clip_epsilon = (
0.2 # clip value for PPO loss: see the equation in the intro for more context.
)
gamma = 0.99
lmbda = 0.95
entropy_eps = 1e-4
Define an environment
In RL, an environment is usually the way we refer to a simulator or a control system. Various libraries provide simulation environments for reinforcement learning, including Gymnasium (previously OpenAI Gym), DeepMind control suite, and many others. As a general library, TorchRL’s goal is to provide an interchangeable interface to a large panel of RL simulators, allowing you to easily swap one environment with another. For example, creating a wrapped gym environment can be achieved with few characters:
There are a few things to notice in this code: first, we created
the environment by calling the GymEnv wrapper. If extra keyword arguments
are passed, they will be transmitted to the gym.make method, hence covering
the most common environment construction commands.
Alternatively, one could also directly create a gym environment using gym.make(env_name, **kwargs)
and wrap it in a GymWrapper class.
Also the device argument: for gym, this only controls the device where
input action and observed states will be stored, but the execution will always
be done on CPU. The reason for this is simply that gym does not support on-device
execution, unless specified otherwise. For other libraries, we have control over
the execution device and, as much as we can, we try to stay consistent in terms of
storing and execution backends.
Transforms
We will append some transforms to our environments to prepare the data for
the policy. In Gym, this is usually achieved via wrappers. TorchRL takes a different
approach, more similar to other pytorch domain libraries, through the use of transforms.
To add transforms to an environment, one should simply wrap it in a TransformedEnv
instance and append the sequence of transforms to it. The transformed environment will inherit
the device and meta-data of the wrapped environment, and transform these depending on the sequence
of transforms it contains.
Normalization
The first to encode is a normalization transform. As a rule of thumbs, it is preferable to have data that loosely match a unit Gaussian distribution: to obtain this, we will run a certain number of random steps in the environment and compute the summary statistics of these observations.
We’ll append two other transforms: the DoubleToFloat transform will
convert double entries to single-precision numbers, ready to be read by the
policy. The StepCounter transform will be used to count the steps before
the environment is terminated. We will use this measure as a supplementary measure
of performance.
As we will see later, many of the TorchRL’s classes rely on TensorDict
to communicate. You could think of it as a python dictionary with some extra
tensor features. In practice, this means that many modules we will be working
with need to be told what key to read (in_keys) and what key to write
(out_keys) in the tensordict they will receive. Usually, if out_keys
is omitted, it is assumed that the in_keys entries will be updated
in-place. For our transforms, the only entry we are interested in is referred
to as "observation" and our transform layers will be told to modify this
entry and this entry only:
env = TransformedEnv(
base_env,
Compose(
# normalize observations
ObservationNorm(in_keys=["observation"]),
DoubleToFloat(),
StepCounter(),
),
)
As you may have noticed, we have created a normalization layer but we did not
set its normalization parameters. To do this, ObservationNorm can
automatically gather the summary statistics of our environment:
env.transform[0].init_stats(num_iter=1000, reduce_dim=0, cat_dim=0)
The ObservationNorm transform has now been populated with a
location and a scale that will be used to normalize the data.
Let us do a little sanity check for the shape of our summary stats:
print("normalization constant shape:", env.transform[0].loc.shape)
normalization constant shape: torch.Size([11])
An environment is not only defined by its simulator and transforms, but also
by a series of metadata that describe what can be expected during its
execution.
For efficiency purposes, TorchRL is quite stringent when it comes to
environment specs, but you can easily check that your environment specs are
adequate.
In our example, the GymWrapper and
GymEnv that inherits
from it already take care of setting the proper specs for your environment so
you should not have to care about this.
Nevertheless, let’s see a concrete example using our transformed
environment by looking at its specs.
There are three specs to look at: observation_spec which defines what
is to be expected when executing an action in the environment,
reward_spec which indicates the reward domain and finally the
input_spec (which contains the action_spec) and which represents
everything an environment requires to execute a single step.
print("observation_spec:", env.observation_spec)
print("reward_spec:", env.reward_spec)
print("input_spec:", env.input_spec)
print("action_spec (as defined by input_spec):", env.action_spec)
observation_spec: Composite(
observation: UnboundedContinuous(
shape=torch.Size([11]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([11]), device=cpu, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([11]), device=cpu, dtype=torch.float32, contiguous=True)),
device=cpu,
dtype=torch.float32,
domain=continuous),
step_count: BoundedDiscrete(
shape=torch.Size([1]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.int64, contiguous=True),
high=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.int64, contiguous=True)),
device=cpu,
dtype=torch.int64,
domain=discrete),
device=cpu,
shape=torch.Size([]))
reward_spec: UnboundedContinuous(
shape=torch.Size([1]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, contiguous=True)),
device=cpu,
dtype=torch.float32,
domain=continuous)
input_spec: Composite(
full_state_spec: Composite(
step_count: BoundedDiscrete(
shape=torch.Size([1]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.int64, contiguous=True),
high=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.int64, contiguous=True)),
device=cpu,
dtype=torch.int64,
domain=discrete),
device=cpu,
shape=torch.Size([])),
full_action_spec: Composite(
action: BoundedContinuous(
shape=torch.Size([1]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, contiguous=True)),
device=cpu,
dtype=torch.float32,
domain=continuous),
device=cpu,
shape=torch.Size([])),
device=cpu,
shape=torch.Size([]))
action_spec (as defined by input_spec): BoundedContinuous(
shape=torch.Size([1]),
space=ContinuousBox(
low=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, contiguous=True),
high=Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, contiguous=True)),
device=cpu,
dtype=torch.float32,
domain=continuous)
the check_env_specs() function runs a small rollout and compares its output against the environment
specs. If no error is raised, we can be confident that the specs are properly defined:
check_env_specs(env)
For fun, let’s see what a simple random rollout looks like. You can call env.rollout(n_steps) and get an overview of what the environment inputs and outputs look like. Actions will automatically be drawn from the action spec domain, so you don’t need to care about designing a random sampler.
Typically, at each step, an RL environment receives an
action as input, and outputs an observation, a reward and a done state. The
observation may be composite, meaning that it could be composed of more than one
tensor. This is not a problem for TorchRL, since the whole set of observations
is automatically packed in the output TensorDict. After executing a rollout
(for example, a sequence of environment steps and random action generations) over a given
number of steps, we will retrieve a TensorDict instance with a shape
that matches this trajectory length:
rollout = env.rollout(3)
print("rollout of three steps:", rollout)
print("Shape of the rollout TensorDict:", rollout.batch_size)
rollout of three steps: TensorDict(
fields={
action: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.float32, is_shared=False),
done: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.bool, is_shared=False),
next: TensorDict(
fields={
done: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.bool, is_shared=False),
observation: Tensor(shape=torch.Size([3, 11]), device=cpu, dtype=torch.float32, is_shared=False),
reward: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.float32, is_shared=False),
step_count: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.int64, is_shared=False),
terminated: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.bool, is_shared=False),
truncated: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.bool, is_shared=False)},
batch_size=torch.Size([3]),
device=cpu,
is_shared=False),
observation: Tensor(shape=torch.Size([3, 11]), device=cpu, dtype=torch.float32, is_shared=False),
step_count: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.int64, is_shared=False),
terminated: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.bool, is_shared=False),
truncated: Tensor(shape=torch.Size([3, 1]), device=cpu, dtype=torch.bool, is_shared=False)},
batch_size=torch.Size([3]),
device=cpu,
is_shared=False)
Shape of the rollout TensorDict: torch.Size([3])
Our rollout data has a shape of torch.Size([3]), which matches the number of steps
we ran it for. The "next" entry points to the data coming after the current step.
In most cases, the "next" data at time t matches the data at t+1, but this
may not be the case if we are using some specific transformations (for example, multi-step).
Policy
PPO utilizes a stochastic policy to handle exploration. This means that our neural network will have to output the parameters of a distribution, rather than a single value corresponding to the action taken.
As the data is continuous, we use a Tanh-Normal distribution to respect the action space boundaries. TorchRL provides such distribution, and the only thing we need to care about is to build a neural network that outputs the right number of parameters for the policy to work with (a location, or mean, and a scale):
The only extra-difficulty that is brought up here is to split our output in two equal parts and map the second to a strictly positive space.
We design the policy in three steps:
Define a neural network
D_obs->2 * D_action. Indeed, ourloc(mu) andscale(sigma) both have dimensionD_action.Append a
NormalParamExtractorto extract a location and a scale (for example, splits the input in two equal parts and applies a positive transformation to the scale parameter).Create a probabilistic
TensorDictModulethat can generate this distribution and sample from it.
actor_net = nn.Sequential(
nn.LazyLinear(num_cells, device=device),
nn.Tanh(),
nn.LazyLinear(num_cells, device=device),
nn.Tanh(),
nn.LazyLinear(num_cells, device=device),
nn.Tanh(),
nn.LazyLinear(2 * env.action_spec.shape[-1], device=device),
NormalParamExtractor(),
)
To enable the policy to “talk” with the environment through the tensordict
data carrier, we wrap the nn.Module in a TensorDictModule. This
class will simply ready the in_keys it is provided with and write the
outputs in-place at the registered out_keys.
policy_module = TensorDictModule(
actor_net, in_keys=["observation"], out_keys=["loc", "scale"]
)
We now need to build a distribution out of the location and scale of our
normal distribution. To do so, we instruct the
ProbabilisticActor
class to build a TanhNormal out of the location and scale
parameters. We also provide the minimum and maximum values of this
distribution, which we gather from the environment specs.
The name of the in_keys (and hence the name of the out_keys from
the TensorDictModule above) cannot be set to any value one may
like, as the TanhNormal distribution constructor will expect the
loc and scale keyword arguments. That being said,
ProbabilisticActor also accepts
Dict[str, str] typed in_keys where the key-value pair indicates
what in_key string should be used for every keyword argument that is to be used.
policy_module = ProbabilisticActor(
module=policy_module,
spec=env.action_spec,
in_keys=["loc", "scale"],
distribution_class=TanhNormal,
distribution_kwargs={
"low": env.action_spec.space.low,
"high": env.action_spec.space.high,
},
return_log_prob=True,
# we'll need the log-prob for the numerator of the importance weights
)
Value network
The value network is a crucial component of the PPO algorithm, even though it won’t be used at inference time. This module will read the observations and return an estimation of the discounted return for the following trajectory. This allows us to amortize learning by relying on the some utility estimation that is learned on-the-fly during training. Our value network share the same structure as the policy, but for simplicity we assign it its own set of parameters.
value_net = nn.Sequential(
nn.LazyLinear(num_cells, device=device),
nn.Tanh(),
nn.LazyLinear(num_cells, device=device),
nn.Tanh(),
nn.LazyLinear(num_cells, device=device),
nn.Tanh(),
nn.LazyLinear(1, device=device),
)
value_module = ValueOperator(
module=value_net,
in_keys=["observation"],
)
let’s try our policy and value modules. As we said earlier, the usage of
TensorDictModule makes it possible to directly read the output
of the environment to run these modules, as they know what information to read
and where to write it:
print("Running policy:", policy_module(env.reset()))
print("Running value:", value_module(env.reset()))
Running policy: TensorDict(
fields={
action: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, is_shared=False),
done: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.bool, is_shared=False),
loc: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, is_shared=False),
observation: Tensor(shape=torch.Size([11]), device=cpu, dtype=torch.float32, is_shared=False),
sample_log_prob: Tensor(shape=torch.Size([]), device=cpu, dtype=torch.float32, is_shared=False),
scale: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, is_shared=False),
step_count: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.int64, is_shared=False),
terminated: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.bool, is_shared=False),
truncated: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.bool, is_shared=False)},
batch_size=torch.Size([]),
device=cpu,
is_shared=False)
Running value: TensorDict(
fields={
done: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.bool, is_shared=False),
observation: Tensor(shape=torch.Size([11]), device=cpu, dtype=torch.float32, is_shared=False),
state_value: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.float32, is_shared=False),
step_count: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.int64, is_shared=False),
terminated: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.bool, is_shared=False),
truncated: Tensor(shape=torch.Size([1]), device=cpu, dtype=torch.bool, is_shared=False)},
batch_size=torch.Size([]),
device=cpu,
is_shared=False)
Data collector
TorchRL provides a set of DataCollector classes. Briefly, these classes execute three operations: reset an environment, compute an action given the latest observation, execute a step in the environment, and repeat the last two steps until the environment signals a stop (or reaches a done state).
They allow you to control how many frames to collect at each iteration
(through the frames_per_batch parameter),
when to reset the environment (through the max_frames_per_traj argument),
on which device the policy should be executed, etc. They are also
designed to work efficiently with batched and multiprocessed environments.
The simplest data collector is the SyncDataCollector:
it is an iterator that you can use to get batches of data of a given length, and
that will stop once a total number of frames (total_frames) have been
collected.
Other data collectors (MultiSyncDataCollector and
MultiaSyncDataCollector) will execute
the same operations in synchronous and asynchronous manner over a
set of multiprocessed workers.
As for the policy and environment before, the data collector will return
TensorDict instances with a total number of elements that will
match frames_per_batch. Using TensorDict to pass data to the
training loop allows you to write data loading pipelines
that are 100% oblivious to the actual specificities of the rollout content.
collector = SyncDataCollector(
env,
policy_module,
frames_per_batch=frames_per_batch,
total_frames=total_frames,
split_trajs=False,
device=device,
)
Replay buffer
Replay buffers are a common building piece of off-policy RL algorithms. In on-policy contexts, a replay buffer is refilled every time a batch of data is collected, and its data is repeatedly consumed for a certain number of epochs.
TorchRL’s replay buffers are built using a common container
ReplayBuffer which takes as argument the components
of the buffer: a storage, a writer, a sampler and possibly some transforms.
Only the storage (which indicates the replay buffer capacity) is mandatory.
We also specify a sampler without repetition to avoid sampling multiple times
the same item in one epoch.
Using a replay buffer for PPO is not mandatory and we could simply
sample the sub-batches from the collected batch, but using these classes
make it easy for us to build the inner training loop in a reproducible way.
replay_buffer = ReplayBuffer(
storage=LazyTensorStorage(max_size=frames_per_batch),
sampler=SamplerWithoutReplacement(),
)
Loss function
The PPO loss can be directly imported from TorchRL for convenience using the
ClipPPOLoss class. This is the easiest way of utilizing PPO:
it hides away the mathematical operations of PPO and the control flow that
goes with it.
PPO requires some “advantage estimation” to be computed. In short, an advantage
is a value that reflects an expectancy over the return value while dealing with
the bias / variance tradeoff.
To compute the advantage, one just needs to (1) build the advantage module, which
utilizes our value operator, and (2) pass each batch of data through it before each
epoch.
The GAE module will update the input tensordict with new "advantage" and
"value_target" entries.
The "value_target" is a gradient-free tensor that represents the empirical
value that the value network should represent with the input observation.
Both of these will be used by ClipPPOLoss to
return the policy and value losses.
advantage_module = GAE(
gamma=gamma, lmbda=lmbda, value_network=value_module, average_gae=True, device=device,
)
loss_module = ClipPPOLoss(
actor_network=policy_module,
critic_network=value_module,
clip_epsilon=clip_epsilon,
entropy_bonus=bool(entropy_eps),
entropy_coef=entropy_eps,
# these keys match by default but we set this for completeness
critic_coef=1.0,
loss_critic_type="smooth_l1",
)
optim = torch.optim.Adam(loss_module.parameters(), lr)
scheduler = torch.optim.lr_scheduler.CosineAnnealingLR(
optim, total_frames // frames_per_batch, 0.0
)
Training loop
We now have all the pieces needed to code our training loop. The steps include:
Collect data
Compute advantage
Loop over the collected to compute loss values
Back propagate
Optimize
Repeat
Repeat
Repeat
logs = defaultdict(list)
pbar = tqdm(total=total_frames)
eval_str = ""
# We iterate over the collector until it reaches the total number of frames it was
# designed to collect:
for i, tensordict_data in enumerate(collector):
# we now have a batch of data to work with. Let's learn something from it.
for _ in range(num_epochs):
# We'll need an "advantage" signal to make PPO work.
# We re-compute it at each epoch as its value depends on the value
# network which is updated in the inner loop.
advantage_module(tensordict_data)
data_view = tensordict_data.reshape(-1)
replay_buffer.extend(data_view.cpu())
for _ in range(frames_per_batch // sub_batch_size):
subdata = replay_buffer.sample(sub_batch_size)
loss_vals = loss_module(subdata.to(device))
loss_value = (
loss_vals["loss_objective"]
+ loss_vals["loss_critic"]
+ loss_vals["loss_entropy"]
)
# Optimization: backward, grad clipping and optimization step
loss_value.backward()
# this is not strictly mandatory but it's good practice to keep
# your gradient norm bounded
torch.nn.utils.clip_grad_norm_(loss_module.parameters(), max_grad_norm)
optim.step()
optim.zero_grad()
logs["reward"].append(tensordict_data["next", "reward"].mean().item())
pbar.update(tensordict_data.numel())
cum_reward_str = (
f"average reward={logs['reward'][-1]: 4.4f} (init={logs['reward'][0]: 4.4f})"
)
logs["step_count"].append(tensordict_data["step_count"].max().item())
stepcount_str = f"step count (max): {logs['step_count'][-1]}"
logs["lr"].append(optim.param_groups[0]["lr"])
lr_str = f"lr policy: {logs['lr'][-1]: 4.4f}"
if i % 10 == 0:
# We evaluate the policy once every 10 batches of data.
# Evaluation is rather simple: execute the policy without exploration
# (take the expected value of the action distribution) for a given
# number of steps (1000, which is our ``env`` horizon).
# The ``rollout`` method of the ``env`` can take a policy as argument:
# it will then execute this policy at each step.
with set_exploration_type(ExplorationType.DETERMINISTIC), torch.no_grad():
# execute a rollout with the trained policy
eval_rollout = env.rollout(1000, policy_module)
logs["eval reward"].append(eval_rollout["next", "reward"].mean().item())
logs["eval reward (sum)"].append(
eval_rollout["next", "reward"].sum().item()
)
logs["eval step_count"].append(eval_rollout["step_count"].max().item())
eval_str = (
f"eval cumulative reward: {logs['eval reward (sum)'][-1]: 4.4f} "
f"(init: {logs['eval reward (sum)'][0]: 4.4f}), "
f"eval step-count: {logs['eval step_count'][-1]}"
)
del eval_rollout
pbar.set_description(", ".join([eval_str, cum_reward_str, stepcount_str, lr_str]))
# We're also using a learning rate scheduler. Like the gradient clipping,
# this is a nice-to-have but nothing necessary for PPO to work.
scheduler.step()
0%| | 0/50000 [00:00<?, ?it/s]
2%|2 | 1000/50000 [00:05<04:08, 197.08it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.0937 (init= 9.0937), step count (max): 13, lr policy: 0.0003: 2%|2 | 1000/50000 [00:05<04:08, 197.08it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.0937 (init= 9.0937), step count (max): 13, lr policy: 0.0003: 4%|4 | 2000/50000 [00:09<03:57, 202.03it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.1182 (init= 9.0937), step count (max): 15, lr policy: 0.0003: 4%|4 | 2000/50000 [00:09<03:57, 202.03it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.1182 (init= 9.0937), step count (max): 15, lr policy: 0.0003: 6%|6 | 3000/50000 [00:14<03:48, 205.35it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.1558 (init= 9.0937), step count (max): 19, lr policy: 0.0003: 6%|6 | 3000/50000 [00:14<03:48, 205.35it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.1558 (init= 9.0937), step count (max): 19, lr policy: 0.0003: 8%|8 | 4000/50000 [00:19<03:42, 206.98it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.1859 (init= 9.0937), step count (max): 21, lr policy: 0.0003: 8%|8 | 4000/50000 [00:19<03:42, 206.98it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.1859 (init= 9.0937), step count (max): 21, lr policy: 0.0003: 10%|# | 5000/50000 [00:24<03:36, 208.25it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2156 (init= 9.0937), step count (max): 32, lr policy: 0.0003: 10%|# | 5000/50000 [00:24<03:36, 208.25it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2156 (init= 9.0937), step count (max): 32, lr policy: 0.0003: 12%|#2 | 6000/50000 [00:28<03:29, 209.58it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2327 (init= 9.0937), step count (max): 33, lr policy: 0.0003: 12%|#2 | 6000/50000 [00:28<03:29, 209.58it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2327 (init= 9.0937), step count (max): 33, lr policy: 0.0003: 14%|#4 | 7000/50000 [00:33<03:24, 210.48it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2143 (init= 9.0937), step count (max): 27, lr policy: 0.0003: 14%|#4 | 7000/50000 [00:33<03:24, 210.48it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2143 (init= 9.0937), step count (max): 27, lr policy: 0.0003: 16%|#6 | 8000/50000 [00:38<03:21, 208.03it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2291 (init= 9.0937), step count (max): 42, lr policy: 0.0003: 16%|#6 | 8000/50000 [00:38<03:21, 208.03it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2291 (init= 9.0937), step count (max): 42, lr policy: 0.0003: 18%|#8 | 9000/50000 [00:43<03:15, 209.72it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2501 (init= 9.0937), step count (max): 50, lr policy: 0.0003: 18%|#8 | 9000/50000 [00:43<03:15, 209.72it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2501 (init= 9.0937), step count (max): 50, lr policy: 0.0003: 20%|## | 10000/50000 [00:47<03:09, 210.78it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2534 (init= 9.0937), step count (max): 47, lr policy: 0.0003: 20%|## | 10000/50000 [00:47<03:09, 210.78it/s]
eval cumulative reward: 110.9799 (init: 110.9799), eval step-count: 11, average reward= 9.2534 (init= 9.0937), step count (max): 47, lr policy: 0.0003: 22%|##2 | 11000/50000 [00:52<03:04, 211.67it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2645 (init= 9.0937), step count (max): 58, lr policy: 0.0003: 22%|##2 | 11000/50000 [00:52<03:04, 211.67it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2645 (init= 9.0937), step count (max): 58, lr policy: 0.0003: 24%|##4 | 12000/50000 [00:57<03:00, 211.05it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2608 (init= 9.0937), step count (max): 56, lr policy: 0.0003: 24%|##4 | 12000/50000 [00:57<03:00, 211.05it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2608 (init= 9.0937), step count (max): 56, lr policy: 0.0003: 26%|##6 | 13000/50000 [01:02<02:54, 211.86it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2730 (init= 9.0937), step count (max): 60, lr policy: 0.0003: 26%|##6 | 13000/50000 [01:02<02:54, 211.86it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2730 (init= 9.0937), step count (max): 60, lr policy: 0.0003: 28%|##8 | 14000/50000 [01:06<02:49, 212.47it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2638 (init= 9.0937), step count (max): 69, lr policy: 0.0003: 28%|##8 | 14000/50000 [01:06<02:49, 212.47it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2638 (init= 9.0937), step count (max): 69, lr policy: 0.0003: 30%|### | 15000/50000 [01:11<02:44, 212.88it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2650 (init= 9.0937), step count (max): 71, lr policy: 0.0002: 30%|### | 15000/50000 [01:11<02:44, 212.88it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2650 (init= 9.0937), step count (max): 71, lr policy: 0.0002: 32%|###2 | 16000/50000 [01:16<02:39, 213.31it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2769 (init= 9.0937), step count (max): 79, lr policy: 0.0002: 32%|###2 | 16000/50000 [01:16<02:39, 213.31it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2769 (init= 9.0937), step count (max): 79, lr policy: 0.0002: 34%|###4 | 17000/50000 [01:20<02:36, 210.72it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2794 (init= 9.0937), step count (max): 65, lr policy: 0.0002: 34%|###4 | 17000/50000 [01:20<02:36, 210.72it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2794 (init= 9.0937), step count (max): 65, lr policy: 0.0002: 36%|###6 | 18000/50000 [01:25<02:30, 211.98it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2827 (init= 9.0937), step count (max): 79, lr policy: 0.0002: 36%|###6 | 18000/50000 [01:25<02:30, 211.98it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2827 (init= 9.0937), step count (max): 79, lr policy: 0.0002: 38%|###8 | 19000/50000 [01:30<02:25, 212.77it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2886 (init= 9.0937), step count (max): 91, lr policy: 0.0002: 38%|###8 | 19000/50000 [01:30<02:25, 212.77it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2886 (init= 9.0937), step count (max): 91, lr policy: 0.0002: 40%|#### | 20000/50000 [01:34<02:20, 213.48it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2952 (init= 9.0937), step count (max): 104, lr policy: 0.0002: 40%|#### | 20000/50000 [01:34<02:20, 213.48it/s]
eval cumulative reward: 287.9746 (init: 110.9799), eval step-count: 30, average reward= 9.2952 (init= 9.0937), step count (max): 104, lr policy: 0.0002: 42%|####2 | 21000/50000 [01:39<02:15, 214.02it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3111 (init= 9.0937), step count (max): 85, lr policy: 0.0002: 42%|####2 | 21000/50000 [01:39<02:15, 214.02it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3111 (init= 9.0937), step count (max): 85, lr policy: 0.0002: 44%|####4 | 22000/50000 [01:44<02:11, 212.47it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2796 (init= 9.0937), step count (max): 50, lr policy: 0.0002: 44%|####4 | 22000/50000 [01:44<02:11, 212.47it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2796 (init= 9.0937), step count (max): 50, lr policy: 0.0002: 46%|####6 | 23000/50000 [01:49<02:06, 213.10it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2896 (init= 9.0937), step count (max): 90, lr policy: 0.0002: 46%|####6 | 23000/50000 [01:49<02:06, 213.10it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2896 (init= 9.0937), step count (max): 90, lr policy: 0.0002: 48%|####8 | 24000/50000 [01:53<02:01, 213.64it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2991 (init= 9.0937), step count (max): 119, lr policy: 0.0002: 48%|####8 | 24000/50000 [01:53<02:01, 213.64it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2991 (init= 9.0937), step count (max): 119, lr policy: 0.0002: 50%|##### | 25000/50000 [01:58<01:56, 213.99it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3030 (init= 9.0937), step count (max): 150, lr policy: 0.0002: 50%|##### | 25000/50000 [01:58<01:56, 213.99it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3030 (init= 9.0937), step count (max): 150, lr policy: 0.0002: 52%|#####2 | 26000/50000 [02:03<01:52, 213.93it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2962 (init= 9.0937), step count (max): 71, lr policy: 0.0001: 52%|#####2 | 26000/50000 [02:03<01:52, 213.93it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2962 (init= 9.0937), step count (max): 71, lr policy: 0.0001: 54%|#####4 | 27000/50000 [02:07<01:47, 214.19it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3023 (init= 9.0937), step count (max): 135, lr policy: 0.0001: 54%|#####4 | 27000/50000 [02:07<01:47, 214.19it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3023 (init= 9.0937), step count (max): 135, lr policy: 0.0001: 56%|#####6 | 28000/50000 [02:12<01:43, 211.63it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3155 (init= 9.0937), step count (max): 179, lr policy: 0.0001: 56%|#####6 | 28000/50000 [02:12<01:43, 211.63it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3155 (init= 9.0937), step count (max): 179, lr policy: 0.0001: 58%|#####8 | 29000/50000 [02:17<01:38, 212.65it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2997 (init= 9.0937), step count (max): 101, lr policy: 0.0001: 58%|#####8 | 29000/50000 [02:17<01:38, 212.65it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.2997 (init= 9.0937), step count (max): 101, lr policy: 0.0001: 60%|###### | 30000/50000 [02:21<01:33, 213.42it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3161 (init= 9.0937), step count (max): 107, lr policy: 0.0001: 60%|###### | 30000/50000 [02:21<01:33, 213.42it/s]
eval cumulative reward: 399.8621 (init: 110.9799), eval step-count: 42, average reward= 9.3161 (init= 9.0937), step count (max): 107, lr policy: 0.0001: 62%|######2 | 31000/50000 [02:26<01:28, 213.99it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3155 (init= 9.0937), step count (max): 110, lr policy: 0.0001: 62%|######2 | 31000/50000 [02:26<01:28, 213.99it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3155 (init= 9.0937), step count (max): 110, lr policy: 0.0001: 64%|######4 | 32000/50000 [02:31<01:24, 213.01it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3202 (init= 9.0937), step count (max): 203, lr policy: 0.0001: 64%|######4 | 32000/50000 [02:31<01:24, 213.01it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3202 (init= 9.0937), step count (max): 203, lr policy: 0.0001: 66%|######6 | 33000/50000 [02:35<01:19, 213.73it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3166 (init= 9.0937), step count (max): 124, lr policy: 0.0001: 66%|######6 | 33000/50000 [02:35<01:19, 213.73it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3166 (init= 9.0937), step count (max): 124, lr policy: 0.0001: 68%|######8 | 34000/50000 [02:40<01:14, 214.22it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3168 (init= 9.0937), step count (max): 111, lr policy: 0.0001: 68%|######8 | 34000/50000 [02:40<01:14, 214.22it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3168 (init= 9.0937), step count (max): 111, lr policy: 0.0001: 70%|####### | 35000/50000 [02:45<01:09, 214.66it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3335 (init= 9.0937), step count (max): 241, lr policy: 0.0001: 70%|####### | 35000/50000 [02:45<01:09, 214.66it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3335 (init= 9.0937), step count (max): 241, lr policy: 0.0001: 72%|#######2 | 36000/50000 [02:49<01:05, 214.99it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3204 (init= 9.0937), step count (max): 136, lr policy: 0.0001: 72%|#######2 | 36000/50000 [02:49<01:05, 214.99it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3204 (init= 9.0937), step count (max): 136, lr policy: 0.0001: 74%|#######4 | 37000/50000 [02:54<01:00, 215.17it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3242 (init= 9.0937), step count (max): 120, lr policy: 0.0001: 74%|#######4 | 37000/50000 [02:54<01:00, 215.17it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3242 (init= 9.0937), step count (max): 120, lr policy: 0.0001: 76%|#######6 | 38000/50000 [02:59<00:56, 212.50it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3259 (init= 9.0937), step count (max): 142, lr policy: 0.0000: 76%|#######6 | 38000/50000 [02:59<00:56, 212.50it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3259 (init= 9.0937), step count (max): 142, lr policy: 0.0000: 78%|#######8 | 39000/50000 [03:03<00:51, 213.53it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3288 (init= 9.0937), step count (max): 156, lr policy: 0.0000: 78%|#######8 | 39000/50000 [03:03<00:51, 213.53it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3288 (init= 9.0937), step count (max): 156, lr policy: 0.0000: 80%|######## | 40000/50000 [03:08<00:46, 214.30it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3332 (init= 9.0937), step count (max): 232, lr policy: 0.0000: 80%|######## | 40000/50000 [03:08<00:46, 214.30it/s]
eval cumulative reward: 325.3530 (init: 110.9799), eval step-count: 34, average reward= 9.3332 (init= 9.0937), step count (max): 232, lr policy: 0.0000: 82%|########2 | 41000/50000 [03:13<00:41, 214.66it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3314 (init= 9.0937), step count (max): 241, lr policy: 0.0000: 82%|########2 | 41000/50000 [03:13<00:41, 214.66it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3314 (init= 9.0937), step count (max): 241, lr policy: 0.0000: 84%|########4 | 42000/50000 [03:18<00:38, 207.54it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3432 (init= 9.0937), step count (max): 400, lr policy: 0.0000: 84%|########4 | 42000/50000 [03:18<00:38, 207.54it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3432 (init= 9.0937), step count (max): 400, lr policy: 0.0000: 86%|########6 | 43000/50000 [03:22<00:33, 209.80it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3342 (init= 9.0937), step count (max): 209, lr policy: 0.0000: 86%|########6 | 43000/50000 [03:22<00:33, 209.80it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3342 (init= 9.0937), step count (max): 209, lr policy: 0.0000: 88%|########8 | 44000/50000 [03:27<00:28, 211.45it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3360 (init= 9.0937), step count (max): 261, lr policy: 0.0000: 88%|########8 | 44000/50000 [03:27<00:28, 211.45it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3360 (init= 9.0937), step count (max): 261, lr policy: 0.0000: 90%|######### | 45000/50000 [03:32<00:23, 212.69it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3398 (init= 9.0937), step count (max): 425, lr policy: 0.0000: 90%|######### | 45000/50000 [03:32<00:23, 212.69it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3398 (init= 9.0937), step count (max): 425, lr policy: 0.0000: 92%|#########2| 46000/50000 [03:36<00:18, 213.64it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3370 (init= 9.0937), step count (max): 252, lr policy: 0.0000: 92%|#########2| 46000/50000 [03:36<00:18, 213.64it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3370 (init= 9.0937), step count (max): 252, lr policy: 0.0000: 94%|#########3| 47000/50000 [03:41<00:14, 214.15it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3485 (init= 9.0937), step count (max): 432, lr policy: 0.0000: 94%|#########3| 47000/50000 [03:41<00:14, 214.15it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3485 (init= 9.0937), step count (max): 432, lr policy: 0.0000: 96%|#########6| 48000/50000 [03:46<00:09, 211.35it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3308 (init= 9.0937), step count (max): 502, lr policy: 0.0000: 96%|#########6| 48000/50000 [03:46<00:09, 211.35it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3308 (init= 9.0937), step count (max): 502, lr policy: 0.0000: 98%|#########8| 49000/50000 [03:51<00:04, 212.63it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3307 (init= 9.0937), step count (max): 233, lr policy: 0.0000: 98%|#########8| 49000/50000 [03:51<00:04, 212.63it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3307 (init= 9.0937), step count (max): 233, lr policy: 0.0000: 100%|##########| 50000/50000 [03:55<00:00, 213.53it/s]
eval cumulative reward: 1757.4402 (init: 110.9799), eval step-count: 187, average reward= 9.3363 (init= 9.0937), step count (max): 179, lr policy: 0.0000: 100%|##########| 50000/50000 [03:55<00:00, 213.53it/s]
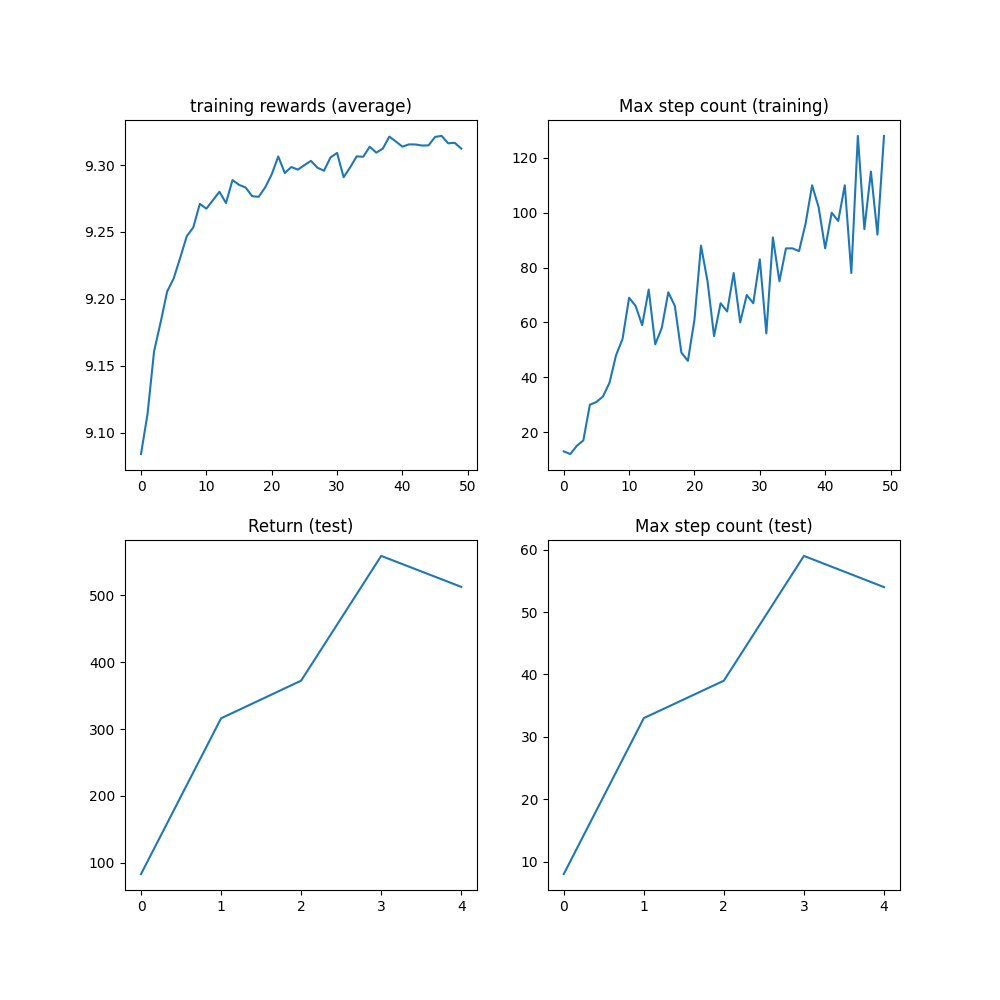
Results
Before the 1M step cap is reached, the algorithm should have reached a max step count of 1000 steps, which is the maximum number of steps before the trajectory is truncated.
plt.figure(figsize=(10, 10))
plt.subplot(2, 2, 1)
plt.plot(logs["reward"])
plt.title("training rewards (average)")
plt.subplot(2, 2, 2)
plt.plot(logs["step_count"])
plt.title("Max step count (training)")
plt.subplot(2, 2, 3)
plt.plot(logs["eval reward (sum)"])
plt.title("Return (test)")
plt.subplot(2, 2, 4)
plt.plot(logs["eval step_count"])
plt.title("Max step count (test)")
plt.show()
Conclusion and next steps
In this tutorial, we have learned:
How to create and customize an environment with
torchrl;How to write a model and a loss function;
How to set up a typical training loop.
If you want to experiment with this tutorial a bit more, you can apply the following modifications:
From an efficiency perspective, we could run several simulations in parallel to speed up data collection. Check
ParallelEnvfor further information.From a logging perspective, one could add a
torchrl.record.VideoRecordertransform to the environment after asking for rendering to get a visual rendering of the inverted pendulum in action. Checktorchrl.recordto know more.
Total running time of the script: ( 3 minutes 58.019 seconds)
