Dynamic shape¶
Dynamic shape refers to the variable nature of a tensor shape where its shape depends on the value of another upstream tensor. For example:
>>> import torch, torch_xla
>>> in_tensor = torch.randint(low=0, high=2, size=(5,5), device='xla:0')
>>> out_tensor = torch.nonzero(in_tensor)
the shape of out_tensor depends on the value of in_tensor and is bounded by the shape of in_tensor. In other words, if you do
>>> print(out_tensor.shape)
torch.Size([<=25, 2])
you can see the first dimension depends on the value of in_tensor and its maximum value is 25. We call the first dimension the dynamic dimension. The second dimension does not depend on any upstream tensors so we call it the static dimension.
Dynamic shape can be further categorized into bounded dynamic shape and unbounded dynamic shape.
bounded dynamic shape: refers to a shape whose dynamic dimensions are bounded by static values. It works for accelerators that require static memory allocation (e.g. TPU).
unbounded dynamic shape: refers to a shape whose dynamic dimensions can be infinitely large. It works for accelerators that don’t require static memory allocation (e.g. GPU).
Today, only the bounded dynamic shape is supported and it is in the experimental phase.
Bounded dynamic shape¶
Currently, we support multi-layer perceptron models (MLP) with dynamic size input on TPU.
This feature is controlled by a flag XLA_EXPERIMENTAL="nonzero:masked_select". To run a model with the feature enabled, you can do:
XLA_EXPERIMENTAL="nonzero:masked_select:masked_scatter" python your_scripts.py
Here are some numbers we get when we run the MLP model for 100 iterations:
No dynamic shape |
With dynamic shape |
|
|---|---|---|
End-to-end training time |
29.49 |
20.03 |
Number of compilations |
102 |
49 |
Compilation cache hit |
198 |
1953 |
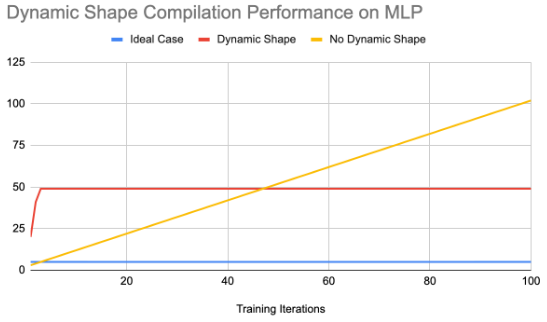
One of the motivations of the dynamic shape is to reduce the number of excessive recompilation when the shape keeps changing between iterations. From the figure above, you can see the number of compilations reduced by half which results in the drop of the training time.
To try it out, run
XLA_EXPERIMENTAL="nonzero:masked_select" PJRT_DEVICE=TPU python3 pytorch/xla/test/ds/test_dynamic_shape_models.py TestDynamicShapeModels.test_backward_pass_with_dynamic_input
For more details on how we plan to expand the dynamic shape support on PyTorch/XLA in the future, feel free to review our RFC.
