torchvision.ops
torchvision.ops implements operators that are specific for Computer Vision.
Note
All operators have native support for TorchScript.
-
torchvision.ops.batched_nms(boxes: torch.Tensor, scores: torch.Tensor, idxs: torch.Tensor, iou_threshold: float) → torch.Tensor[source] Performs non-maximum suppression in a batched fashion.
Each index value correspond to a category, and NMS will not be applied between elements of different categories.
- Parameters
boxes (Tensor[N, 4]) – boxes where NMS will be performed. They are expected to be in
(x1, y1, x2, y2)format with0 <= x1 < x2and0 <= y1 < y2.scores (Tensor[N]) – scores for each one of the boxes
idxs (Tensor[N]) – indices of the categories for each one of the boxes.
iou_threshold (float) – discards all overlapping boxes with IoU > iou_threshold
- Returns
int64 tensor with the indices of the elements that have been kept by NMS, sorted in decreasing order of scores
- Return type
Tensor
-
torchvision.ops.box_area(boxes: torch.Tensor) → torch.Tensor[source] Computes the area of a set of bounding boxes, which are specified by their (x1, y1, x2, y2) coordinates.
- Parameters
boxes (Tensor[N, 4]) – boxes for which the area will be computed. They are expected to be in (x1, y1, x2, y2) format with
0 <= x1 < x2and0 <= y1 < y2.- Returns
the area for each box
- Return type
Tensor[N]
-
torchvision.ops.box_convert(boxes: torch.Tensor, in_fmt: str, out_fmt: str) → torch.Tensor[source] Converts boxes from given in_fmt to out_fmt. Supported in_fmt and out_fmt are:
‘xyxy’: boxes are represented via corners, x1, y1 being top left and x2, y2 being bottom right. This is the format that torchvision utilities expect.
‘xywh’ : boxes are represented via corner, width and height, x1, y2 being top left, w, h being width and height.
‘cxcywh’ : boxes are represented via centre, width and height, cx, cy being center of box, w, h being width and height.
- Parameters
- Returns
Boxes into converted format.
- Return type
Tensor[N, 4]
-
torchvision.ops.box_iou(boxes1: torch.Tensor, boxes2: torch.Tensor) → torch.Tensor[source] Return intersection-over-union (Jaccard index) between two sets of boxes.
Both sets of boxes are expected to be in
(x1, y1, x2, y2)format with0 <= x1 < x2and0 <= y1 < y2.- Parameters
boxes1 (Tensor[N, 4]) – first set of boxes
boxes2 (Tensor[M, 4]) – second set of boxes
- Returns
the NxM matrix containing the pairwise IoU values for every element in boxes1 and boxes2
- Return type
Tensor[N, M]
-
torchvision.ops.clip_boxes_to_image(boxes: torch.Tensor, size: Tuple[int, int]) → torch.Tensor[source] Clip boxes so that they lie inside an image of size size.
- Parameters
boxes (Tensor[N, 4]) – boxes in
(x1, y1, x2, y2)format with0 <= x1 < x2and0 <= y1 < y2.size (Tuple[height, width]) – size of the image
- Returns
clipped boxes
- Return type
Tensor[N, 4]
-
torchvision.ops.deform_conv2d(input: torch.Tensor, offset: torch.Tensor, weight: torch.Tensor, bias: Optional[torch.Tensor] = None, stride: Tuple[int, int] = (1, 1), padding: Tuple[int, int] = (0, 0), dilation: Tuple[int, int] = (1, 1), mask: Optional[torch.Tensor] = None) → torch.Tensor[source] Performs Deformable Convolution v2, described in Deformable ConvNets v2: More Deformable, Better Results if
maskis notNoneand Performs Deformable Convolution, described in Deformable Convolutional Networks ifmaskisNone.- Parameters
input (Tensor[batch_size, in_channels, in_height, in_width]) – input tensor
offset (Tensor[batch_size, 2 * offset_groups * kernel_height * kernel_width, out_height, out_width]) – offsets to be applied for each position in the convolution kernel.
weight (Tensor[out_channels, in_channels // groups, kernel_height, kernel_width]) – convolution weights, split into groups of size (in_channels // groups)
bias (Tensor[out_channels]) – optional bias of shape (out_channels,). Default: None
stride (int or Tuple[int, int]) – distance between convolution centers. Default: 1
padding (int or Tuple[int, int]) – height/width of padding of zeroes around each image. Default: 0
dilation (int or Tuple[int, int]) – the spacing between kernel elements. Default: 1
mask (Tensor[batch_size, offset_groups * kernel_height * kernel_width, out_height, out_width]) – masks to be applied for each position in the convolution kernel. Default: None
- Returns
result of convolution
- Return type
Tensor[batch_sz, out_channels, out_h, out_w]
- Examples::
>>> input = torch.rand(4, 3, 10, 10) >>> kh, kw = 3, 3 >>> weight = torch.rand(5, 3, kh, kw) >>> # offset and mask should have the same spatial size as the output >>> # of the convolution. In this case, for an input of 10, stride of 1 >>> # and kernel size of 3, without padding, the output size is 8 >>> offset = torch.rand(4, 2 * kh * kw, 8, 8) >>> mask = torch.rand(4, kh * kw, 8, 8) >>> out = deform_conv2d(input, offset, weight, mask=mask) >>> print(out.shape) >>> # returns >>> torch.Size([4, 5, 8, 8])
-
torchvision.ops.generalized_box_iou(boxes1: torch.Tensor, boxes2: torch.Tensor) → torch.Tensor[source] Return generalized intersection-over-union (Jaccard index) between two sets of boxes.
Both sets of boxes are expected to be in
(x1, y1, x2, y2)format with0 <= x1 < x2and0 <= y1 < y2.- Parameters
boxes1 (Tensor[N, 4]) – first set of boxes
boxes2 (Tensor[M, 4]) – second set of boxes
- Returns
the NxM matrix containing the pairwise generalized IoU values for every element in boxes1 and boxes2
- Return type
Tensor[N, M]
-
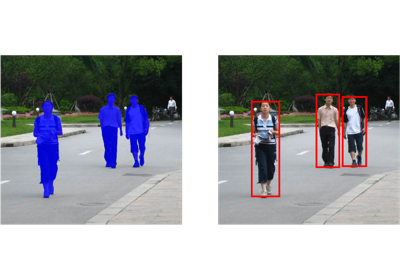
torchvision.ops.masks_to_boxes(masks: torch.Tensor) → torch.Tensor[source] Compute the bounding boxes around the provided masks.
Returns a [N, 4] tensor containing bounding boxes. The boxes are in
(x1, y1, x2, y2)format with0 <= x1 < x2and0 <= y1 < y2.- Parameters
masks (Tensor[N, H, W]) – masks to transform where N is the number of masks and (H, W) are the spatial dimensions.
- Returns
bounding boxes
- Return type
Tensor[N, 4]
Examples using
masks_to_boxes:
-
torchvision.ops.nms(boxes: torch.Tensor, scores: torch.Tensor, iou_threshold: float) → torch.Tensor[source] Performs non-maximum suppression (NMS) on the boxes according to their intersection-over-union (IoU).
NMS iteratively removes lower scoring boxes which have an IoU greater than iou_threshold with another (higher scoring) box.
If multiple boxes have the exact same score and satisfy the IoU criterion with respect to a reference box, the selected box is not guaranteed to be the same between CPU and GPU. This is similar to the behavior of argsort in PyTorch when repeated values are present.
- Parameters
boxes (Tensor[N, 4])) – boxes to perform NMS on. They are expected to be in
(x1, y1, x2, y2)format with0 <= x1 < x2and0 <= y1 < y2.scores (Tensor[N]) – scores for each one of the boxes
iou_threshold (float) – discards all overlapping boxes with IoU > iou_threshold
- Returns
int64 tensor with the indices of the elements that have been kept by NMS, sorted in decreasing order of scores
- Return type
Tensor
-
torchvision.ops.ps_roi_align(input: torch.Tensor, boxes: torch.Tensor, output_size: int, spatial_scale: float = 1.0, sampling_ratio: int = - 1) → torch.Tensor[source] Performs Position-Sensitive Region of Interest (RoI) Align operator mentioned in Light-Head R-CNN.
- Parameters
input (Tensor[N, C, H, W]) – The input tensor, i.e. a batch with
Nelements. Each element containsCfeature maps of dimensionsH x W.boxes (Tensor[K, 5] or List[Tensor[L, 4]]) – the box coordinates in (x1, y1, x2, y2) format where the regions will be taken from. The coordinate must satisfy
0 <= x1 < x2and0 <= y1 < y2. If a single Tensor is passed, then the first column should contain the index of the corresponding element in the batch, i.e. a number in[0, N - 1]. If a list of Tensors is passed, then each Tensor will correspond to the boxes for an element i in the batch.output_size (int or Tuple[int, int]) – the size of the output (in bins or pixels) after the pooling is performed, as (height, width).
spatial_scale (float) – a scaling factor that maps the input coordinates to the box coordinates. Default: 1.0
sampling_ratio (int) – number of sampling points in the interpolation grid used to compute the output value of each pooled output bin. If > 0, then exactly
sampling_ratio x sampling_ratiosampling points per bin are used. If <= 0, then an adaptive number of grid points are used (computed asceil(roi_width / output_width), and likewise for height). Default: -1
- Returns
The pooled RoIs
- Return type
Tensor[K, C / (output_size[0] * output_size[1]), output_size[0], output_size[1]]
-
torchvision.ops.ps_roi_pool(input: torch.Tensor, boxes: torch.Tensor, output_size: int, spatial_scale: float = 1.0) → torch.Tensor[source] Performs Position-Sensitive Region of Interest (RoI) Pool operator described in R-FCN
- Parameters
input (Tensor[N, C, H, W]) – The input tensor, i.e. a batch with
Nelements. Each element containsCfeature maps of dimensionsH x W.boxes (Tensor[K, 5] or List[Tensor[L, 4]]) – the box coordinates in (x1, y1, x2, y2) format where the regions will be taken from. The coordinate must satisfy
0 <= x1 < x2and0 <= y1 < y2. If a single Tensor is passed, then the first column should contain the index of the corresponding element in the batch, i.e. a number in[0, N - 1]. If a list of Tensors is passed, then each Tensor will correspond to the boxes for an element i in the batch.output_size (int or Tuple[int, int]) – the size of the output (in bins or pixels) after the pooling is performed, as (height, width).
spatial_scale (float) – a scaling factor that maps the input coordinates to the box coordinates. Default: 1.0
- Returns
The pooled RoIs.
- Return type
Tensor[K, C / (output_size[0] * output_size[1]), output_size[0], output_size[1]]
-
torchvision.ops.remove_small_boxes(boxes: torch.Tensor, min_size: float) → torch.Tensor[source] Remove boxes which contains at least one side smaller than min_size.
- Parameters
boxes (Tensor[N, 4]) – boxes in
(x1, y1, x2, y2)format with0 <= x1 < x2and0 <= y1 < y2.min_size (float) – minimum size
- Returns
indices of the boxes that have both sides larger than min_size
- Return type
Tensor[K]
-
torchvision.ops.roi_align(input: torch.Tensor, boxes: Union[torch.Tensor, List[torch.Tensor]], output_size: None, spatial_scale: float = 1.0, sampling_ratio: int = - 1, aligned: bool = False) → torch.Tensor[source] Performs Region of Interest (RoI) Align operator with average pooling, as described in Mask R-CNN.
- Parameters
input (Tensor[N, C, H, W]) – The input tensor, i.e. a batch with
Nelements. Each element containsCfeature maps of dimensionsH x W. If the tensor is quantized, we expect a batch size ofN == 1.boxes (Tensor[K, 5] or List[Tensor[L, 4]]) – the box coordinates in (x1, y1, x2, y2) format where the regions will be taken from. The coordinate must satisfy
0 <= x1 < x2and0 <= y1 < y2. If a single Tensor is passed, then the first column should contain the index of the corresponding element in the batch, i.e. a number in[0, N - 1]. If a list of Tensors is passed, then each Tensor will correspond to the boxes for an element i in the batch.output_size (int or Tuple[int, int]) – the size of the output (in bins or pixels) after the pooling is performed, as (height, width).
spatial_scale (float) – a scaling factor that maps the input coordinates to the box coordinates. Default: 1.0
sampling_ratio (int) – number of sampling points in the interpolation grid used to compute the output value of each pooled output bin. If > 0, then exactly
sampling_ratio x sampling_ratiosampling points per bin are used. If <= 0, then an adaptive number of grid points are used (computed asceil(roi_width / output_width), and likewise for height). Default: -1aligned (bool) – If False, use the legacy implementation. If True, pixel shift the box coordinates it by -0.5 for a better alignment with the two neighboring pixel indices. This version is used in Detectron2
- Returns
The pooled RoIs.
- Return type
Tensor[K, C, output_size[0], output_size[1]]
-
torchvision.ops.roi_pool(input: torch.Tensor, boxes: Union[torch.Tensor, List[torch.Tensor]], output_size: None, spatial_scale: float = 1.0) → torch.Tensor[source] Performs Region of Interest (RoI) Pool operator described in Fast R-CNN
- Parameters
input (Tensor[N, C, H, W]) – The input tensor, i.e. a batch with
Nelements. Each element containsCfeature maps of dimensionsH x W.boxes (Tensor[K, 5] or List[Tensor[L, 4]]) – the box coordinates in (x1, y1, x2, y2) format where the regions will be taken from. The coordinate must satisfy
0 <= x1 < x2and0 <= y1 < y2. If a single Tensor is passed, then the first column should contain the index of the corresponding element in the batch, i.e. a number in[0, N - 1]. If a list of Tensors is passed, then each Tensor will correspond to the boxes for an element i in the batch.output_size (int or Tuple[int, int]) – the size of the output after the cropping is performed, as (height, width)
spatial_scale (float) – a scaling factor that maps the input coordinates to the box coordinates. Default: 1.0
- Returns
The pooled RoIs.
- Return type
Tensor[K, C, output_size[0], output_size[1]]
-
torchvision.ops.sigmoid_focal_loss(inputs: torch.Tensor, targets: torch.Tensor, alpha: float = 0.25, gamma: float = 2, reduction: str = 'none')[source] Original implementation from https://github.com/facebookresearch/fvcore/blob/master/fvcore/nn/focal_loss.py . Loss used in RetinaNet for dense detection: https://arxiv.org/abs/1708.02002.
- Parameters
inputs – A float tensor of arbitrary shape. The predictions for each example.
targets – A float tensor with the same shape as inputs. Stores the binary classification label for each element in inputs (0 for the negative class and 1 for the positive class).
alpha – (optional) Weighting factor in range (0,1) to balance positive vs negative examples or -1 for ignore. Default = 0.25
gamma – Exponent of the modulating factor (1 - p_t) to balance easy vs hard examples.
reduction – ‘none’ | ‘mean’ | ‘sum’ ‘none’: No reduction will be applied to the output. ‘mean’: The output will be averaged. ‘sum’: The output will be summed.
- Returns
Loss tensor with the reduction option applied.
-
torchvision.ops.stochastic_depth(input: torch.Tensor, p: float, mode: str, training: bool = True) → torch.Tensor[source] Implements the Stochastic Depth from “Deep Networks with Stochastic Depth” used for randomly dropping residual branches of residual architectures.
- Parameters
input (Tensor[N, ..]) – The input tensor or arbitrary dimensions with the first one being its batch i.e. a batch with
Nrows.p (float) – probability of the input to be zeroed.
mode (str) –
"batch"or"row"."batch"randomly zeroes the entire input,"row"zeroes randomly selected rows from the batch.training – apply stochastic depth if is
True. Default:True
- Returns
The randomly zeroed tensor.
- Return type
Tensor[N, ..]
-
class
torchvision.ops.RoIAlign(output_size: None, spatial_scale: float, sampling_ratio: int, aligned: bool = False)[source] See
roi_align().
-
class
torchvision.ops.PSRoIAlign(output_size: int, spatial_scale: float, sampling_ratio: int)[source] See
ps_roi_align().
-
class
torchvision.ops.RoIPool(output_size: None, spatial_scale: float)[source] See
roi_pool().
-
class
torchvision.ops.PSRoIPool(output_size: int, spatial_scale: float)[source] See
ps_roi_pool().
-
class
torchvision.ops.DeformConv2d(in_channels: int, out_channels: int, kernel_size: int, stride: int = 1, padding: int = 0, dilation: int = 1, groups: int = 1, bias: bool = True)[source] See
deform_conv2d().
-
class
torchvision.ops.MultiScaleRoIAlign(featmap_names: List[str], output_size: Union[int, Tuple[int], List[int]], sampling_ratio: int, *, canonical_scale: int = 224, canonical_level: int = 4)[source] Multi-scale RoIAlign pooling, which is useful for detection with or without FPN.
It infers the scale of the pooling via the heuristics specified in eq. 1 of the Feature Pyramid Network paper. They keyword-only parameters
canonical_scaleandcanonical_levelcorrespond respectively to224andk0=4in eq. 1, and have the following meaning:canonical_levelis the target level of the pyramid from which to pool a region of interest withw x h = canonical_scale x canonical_scale.- Parameters
featmap_names (List[str]) – the names of the feature maps that will be used for the pooling.
output_size (List[Tuple[int, int]] or List[int]) – output size for the pooled region
sampling_ratio (int) – sampling ratio for ROIAlign
canonical_scale (int, optional) – canonical_scale for LevelMapper
canonical_level (int, optional) – canonical_level for LevelMapper
Examples:
>>> m = torchvision.ops.MultiScaleRoIAlign(['feat1', 'feat3'], 3, 2) >>> i = OrderedDict() >>> i['feat1'] = torch.rand(1, 5, 64, 64) >>> i['feat2'] = torch.rand(1, 5, 32, 32) # this feature won't be used in the pooling >>> i['feat3'] = torch.rand(1, 5, 16, 16) >>> # create some random bounding boxes >>> boxes = torch.rand(6, 4) * 256; boxes[:, 2:] += boxes[:, :2] >>> # original image size, before computing the feature maps >>> image_sizes = [(512, 512)] >>> output = m(i, [boxes], image_sizes) >>> print(output.shape) >>> torch.Size([6, 5, 3, 3])
-
class
torchvision.ops.FeaturePyramidNetwork(in_channels_list: List[int], out_channels: int, extra_blocks: Optional[torchvision.ops.feature_pyramid_network.ExtraFPNBlock] = None)[source] Module that adds a FPN from on top of a set of feature maps. This is based on “Feature Pyramid Network for Object Detection”.
The feature maps are currently supposed to be in increasing depth order.
The input to the model is expected to be an OrderedDict[Tensor], containing the feature maps on top of which the FPN will be added.
- Parameters
in_channels_list (list[int]) – number of channels for each feature map that is passed to the module
out_channels (int) – number of channels of the FPN representation
extra_blocks (ExtraFPNBlock or None) – if provided, extra operations will be performed. It is expected to take the fpn features, the original features and the names of the original features as input, and returns a new list of feature maps and their corresponding names
Examples:
>>> m = torchvision.ops.FeaturePyramidNetwork([10, 20, 30], 5) >>> # get some dummy data >>> x = OrderedDict() >>> x['feat0'] = torch.rand(1, 10, 64, 64) >>> x['feat2'] = torch.rand(1, 20, 16, 16) >>> x['feat3'] = torch.rand(1, 30, 8, 8) >>> # compute the FPN on top of x >>> output = m(x) >>> print([(k, v.shape) for k, v in output.items()]) >>> # returns >>> [('feat0', torch.Size([1, 5, 64, 64])), >>> ('feat2', torch.Size([1, 5, 16, 16])), >>> ('feat3', torch.Size([1, 5, 8, 8]))]
-
class
torchvision.ops.StochasticDepth(p: float, mode: str)[source] See
stochastic_depth().
