HybridNets
Start from a Python>=3.7 environment with PyTorch>=1.10 installed. To install PyTorch see https://pytorch.org/get-started/locally/. To install HybridNets dependencies:
pip install -qr https://raw.githubusercontent.com/datvuthanh/HybridNets/main/requirements.txt # install dependencies
Model Description
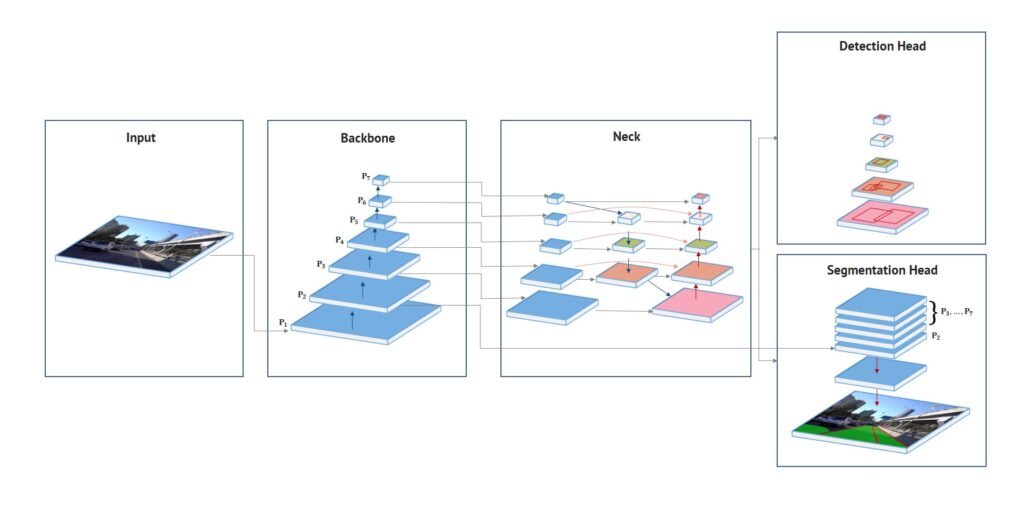
HybridNets is an end2end perception network for multi-tasks. Our work focused on traffic object detection, drivable area segmentation and lane detection. HybridNets can run real-time on embedded systems, and obtains SOTA Object Detection, Lane Detection on BDD100K Dataset.
Results
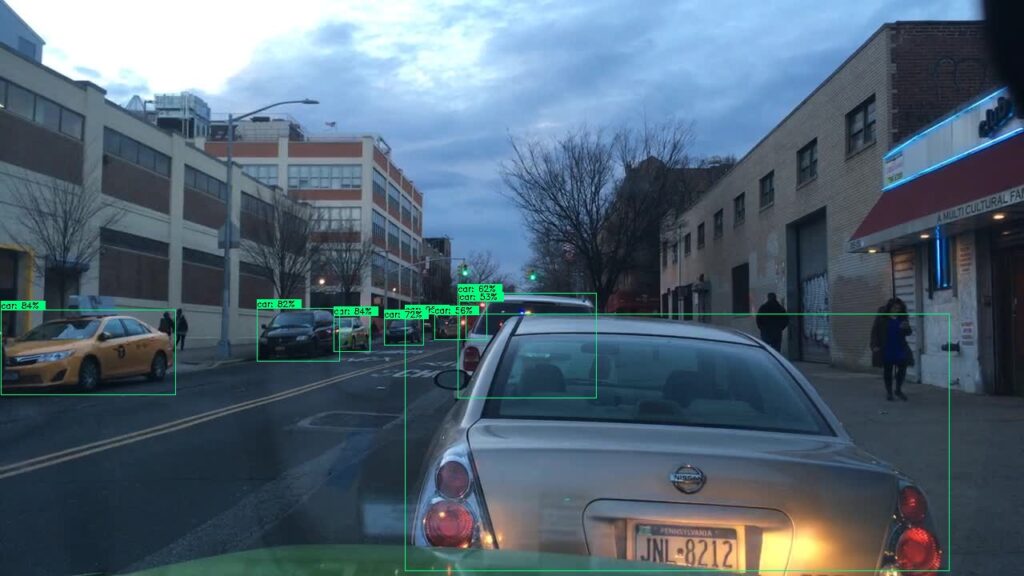
Traffic Object Detection
| Model | Recall (%) | mAP@0.5 (%) |
|---|---|---|
MultiNet | 81.3 | 60.2 |
DLT-Net | 89.4 | 68.4 |
Faster R-CNN | 77.2 | 55.6 |
YOLOv5s | 86.8 | 77.2 |
YOLOP | 89.2 | 76.5 |
HybridNets | 92.8 | 77.3 |

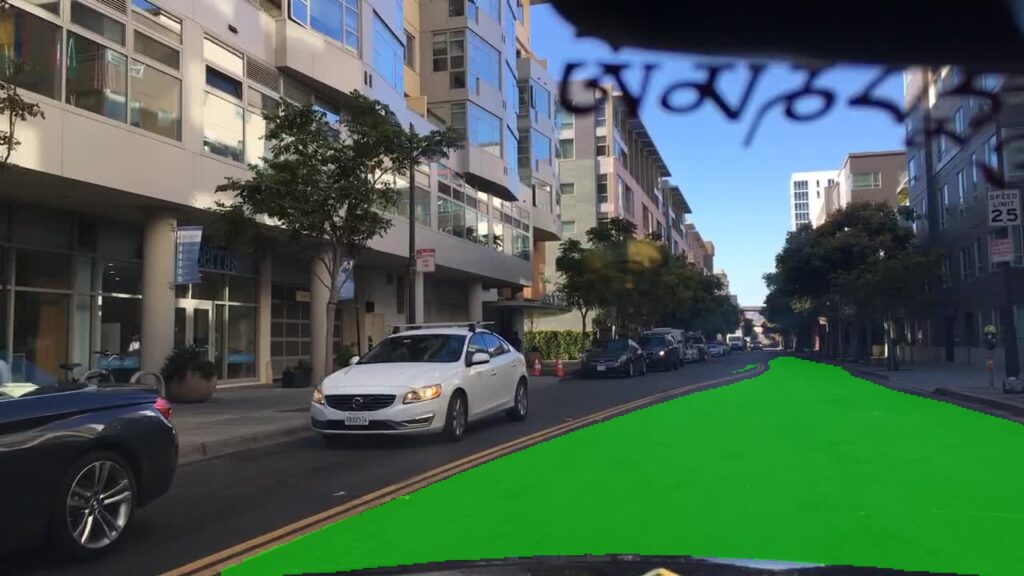
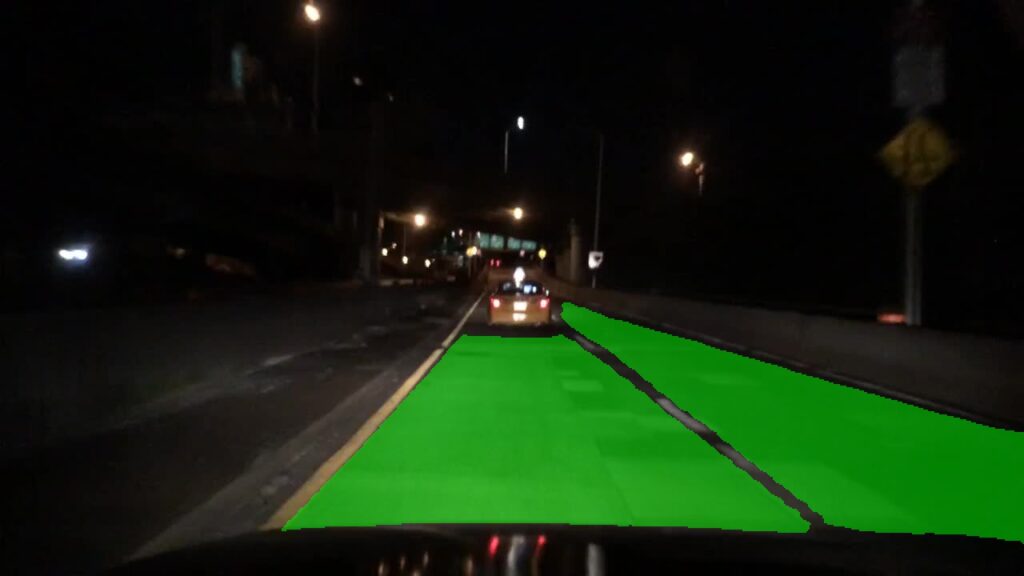
Drivable Area Segmentation
| Model | Drivable mIoU (%) |
|---|---|
MultiNet | 71.6 |
DLT-Net | 71.3 |
PSPNet | 89.6 |
YOLOP | 91.5 |
HybridNets | 90.5 |
Lane Line Detection
| Model | Accuracy (%) | Lane Line IoU (%) |
|---|---|---|
Enet | 34.12 | 14.64 |
SCNN | 35.79 | 15.84 |
Enet-SAD | 36.56 | 16.02 |
YOLOP | 70.5 | 26.2 |
HybridNets | 85.4 | 31.6 |


Load From PyTorch Hub
This example loads the pretrained HybridNets model and passes an image for inference.
import torch
# load model
model = torch.hub.load('datvuthanh/hybridnets', 'hybridnets', pretrained=True)
#inference
img = torch.randn(1,3,640,384)
features, regression, classification, anchors, segmentation = model(img)
Citation
If you find our paper and code useful for your research, please consider giving a star and citation:
@misc{vu2022hybridnets,
title={HybridNets: End-to-End Perception Network},
author={Dat Vu and Bao Ngo and Hung Phan},
year={2022},
eprint={2203.09035},
archivePrefix={arXiv},
primaryClass={cs.CV}
}