Note
Click here to download the full example code
Repurposing masks into bounding boxes¶
The following example illustrates the operations available the torchvision.ops module for repurposing segmentation masks into object localization annotations for different tasks (e.g. transforming masks used by instance and panoptic segmentation methods into bounding boxes used by object detection methods).
# sphinx_gallery_thumbnail_path = "../../gallery/assets/repurposing_annotations_thumbnail.png"
import os
import numpy as np
import torch
import matplotlib.pyplot as plt
import torchvision.transforms.functional as F
ASSETS_DIRECTORY = "assets"
plt.rcParams["savefig.bbox"] = "tight"
def show(imgs):
if not isinstance(imgs, list):
imgs = [imgs]
fix, axs = plt.subplots(ncols=len(imgs), squeeze=False)
for i, img in enumerate(imgs):
img = img.detach()
img = F.to_pil_image(img)
axs[0, i].imshow(np.asarray(img))
axs[0, i].set(xticklabels=[], yticklabels=[], xticks=[], yticks=[])
Masks¶
In tasks like instance and panoptic segmentation, masks are commonly defined, and are defined by this package, as a multi-dimensional array (e.g. a NumPy array or a PyTorch tensor) with the following shape:
(num_objects, height, width)
Where num_objects is the number of annotated objects in the image. Each (height, width) object corresponds to exactly one object. For example, if your input image has the dimensions 224 x 224 and has four annotated objects the shape of your masks annotation has the following shape:
(4, 224, 224).
A nice property of masks is that they can be easily repurposed to be used in methods to solve a variety of object localization tasks.
Converting Masks to Bounding Boxes¶
For example, the masks_to_boxes() operation can be used to
transform masks into bounding boxes that can be
used as input to detection models such as FasterRCNN and RetinaNet.
We will take images and masks from the PenFudan Dataset.
from torchvision.io import read_image
img_path = os.path.join(ASSETS_DIRECTORY, "FudanPed00054.png")
mask_path = os.path.join(ASSETS_DIRECTORY, "FudanPed00054_mask.png")
img = read_image(img_path)
mask = read_image(mask_path)
Here the masks are represented as a PNG Image, with floating point values. Each pixel is encoded as different colors, with 0 being background. Notice that the spatial dimensions of image and mask match.
Out:
torch.Size([1, 498, 533])
torch.Size([3, 498, 533])
tensor([[[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
...,
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0],
[0, 0, 0, ..., 0, 0, 0]]], dtype=torch.uint8)
# We get the unique colors, as these would be the object ids.
obj_ids = torch.unique(mask)
# first id is the background, so remove it.
obj_ids = obj_ids[1:]
# split the color-encoded mask into a set of boolean masks.
# Note that this snippet would work as well if the masks were float values instead of ints.
masks = mask == obj_ids[:, None, None]
Now the masks are a boolean tensor. The first dimension in this case 3 and denotes the number of instances: there are 3 people in the image. The other two dimensions are height and width, which are equal to the dimensions of the image. For each instance, the boolean tensors represent if the particular pixel belongs to the segmentation mask of the image.
Out:
torch.Size([3, 498, 533])
tensor([[[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
...,
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False]],
[[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
...,
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False]],
[[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
...,
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False],
[False, False, False, ..., False, False, False]]])
Let us visualize an image and plot its corresponding segmentation masks.
We will use the draw_segmentation_masks() to draw the segmentation masks.
from torchvision.utils import draw_segmentation_masks
drawn_masks = []
for mask in masks:
drawn_masks.append(draw_segmentation_masks(img, mask, alpha=0.8, colors="blue"))
show(drawn_masks)

To convert the boolean masks into bounding boxes.
We will use the masks_to_boxes() from the torchvision.ops module
It returns the boxes in (xmin, ymin, xmax, ymax) format.
Out:
torch.Size([3, 4])
tensor([[ 96., 134., 181., 417.],
[286., 113., 357., 331.],
[363., 120., 436., 328.]])
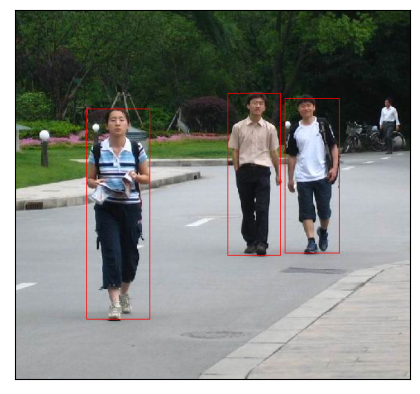
As the shape denotes, there are 3 boxes and in (xmin, ymin, xmax, ymax) format.
These can be visualized very easily with draw_bounding_boxes() utility
provided in torchvision.utils.
from torchvision.utils import draw_bounding_boxes
drawn_boxes = draw_bounding_boxes(img, boxes, colors="red")
show(drawn_boxes)
These boxes can now directly be used by detection models in torchvision.
Here is demo with a Faster R-CNN model loaded from
fasterrcnn_resnet50_fpn()
from torchvision.models.detection import fasterrcnn_resnet50_fpn
model = fasterrcnn_resnet50_fpn(pretrained=True, progress=False)
print(img.size())
img = F.convert_image_dtype(img, torch.float)
target = {}
target["boxes"] = boxes
target["labels"] = labels = torch.ones((masks.size(0),), dtype=torch.int64)
detection_outputs = model(img.unsqueeze(0), [target])
Out:
Downloading: "https://download.pytorch.org/models/fasterrcnn_resnet50_fpn_coco-258fb6c6.pth" to /root/.cache/torch/hub/checkpoints/fasterrcnn_resnet50_fpn_coco-258fb6c6.pth
torch.Size([3, 498, 533])
Converting Segmentation Dataset to Detection Dataset¶
With this utility it becomes very simple to convert a segmentation dataset to a detection dataset. With this we can now use a segmentation dataset to train a detection model. One can similarly convert panoptic dataset to detection dataset. Here is an example where we re-purpose the dataset from the PenFudan Detection Tutorial.
class SegmentationToDetectionDataset(torch.utils.data.Dataset):
def __init__(self, root, transforms):
self.root = root
self.transforms = transforms
# load all image files, sorting them to
# ensure that they are aligned
self.imgs = list(sorted(os.listdir(os.path.join(root, "PNGImages"))))
self.masks = list(sorted(os.listdir(os.path.join(root, "PedMasks"))))
def __getitem__(self, idx):
# load images and masks
img_path = os.path.join(self.root, "PNGImages", self.imgs[idx])
mask_path = os.path.join(self.root, "PedMasks", self.masks[idx])
img = read_image(img_path)
mask = read_image(mask_path)
img = F.convert_image_dtype(img, dtype=torch.float)
mask = F.convert_image_dtype(mask, dtype=torch.float)
# We get the unique colors, as these would be the object ids.
obj_ids = torch.unique(mask)
# first id is the background, so remove it.
obj_ids = obj_ids[1:]
# split the color-encoded mask into a set of boolean masks.
masks = mask == obj_ids[:, None, None]
boxes = masks_to_boxes(masks)
# there is only one class
labels = torch.ones((masks.shape[0],), dtype=torch.int64)
target = {}
target["boxes"] = boxes
target["labels"] = labels
if self.transforms is not None:
img, target = self.transforms(img, target)
return img, target
Total running time of the script: ( 0 minutes 2.142 seconds)
